Модуль TerraMatch предназначен для выполнения калибровки воздушной или мобильной сканирующей системы по результатам калибровочных полетов/заездов, а также коррекции результатов рабочей съемки с целью повышения точности конечного продукта. На основании оценки невязок лазерных данных различных включений с контрольными точками и между собой определяются значения поправок калибровочных параметров системы, параметров траектории и ориентации. В TerraMatch реализована поддержка двух подходов оценки расхождений:
— различие поверхностей, построенных по облакам точек определенных классов (этот подход эффективно работает на данных воздушной лазерной съемки)
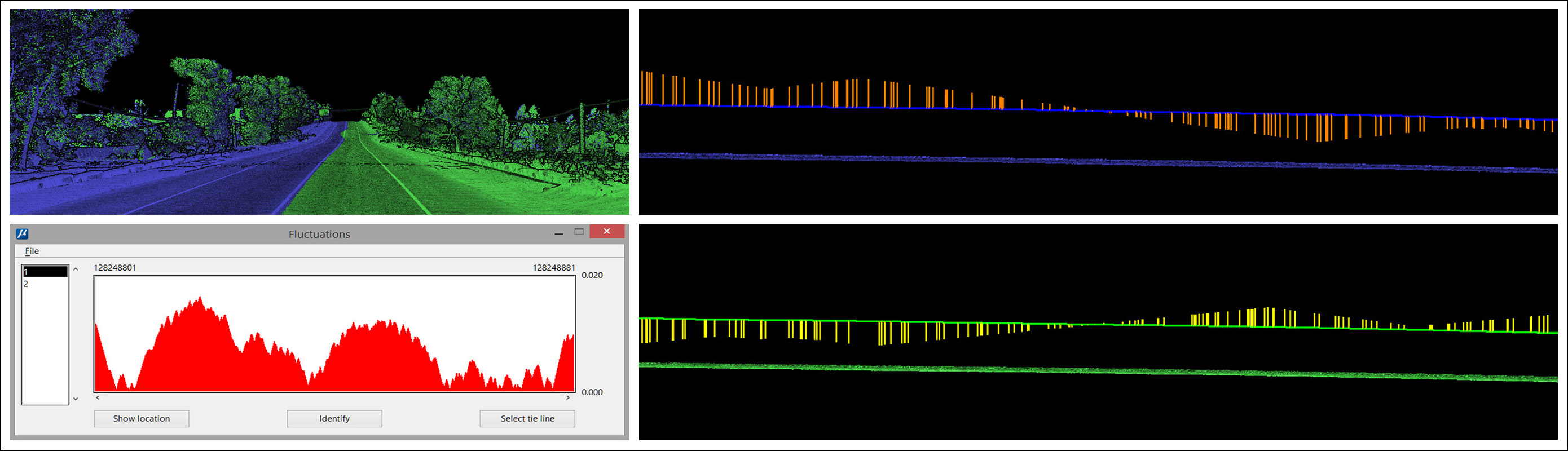
— различие между «связующими линиями», определяющими гомогенные фрагменты данных на разных маршрутах или данных съемки разными сканерами.
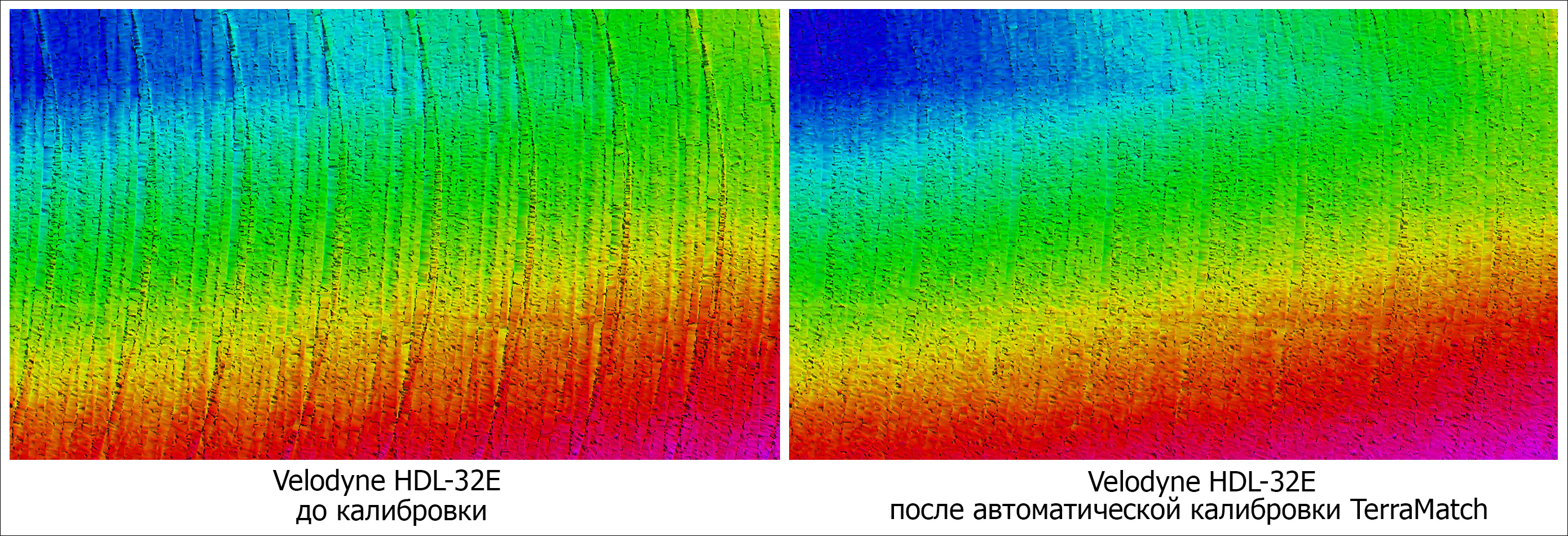
Концепция «связующих линий» является универсальной. Она позволяет калибровать и корректировать данные как воздушных, так и мобильных сканирующих систем, включая системы, состоящие из нескольких датчиков, например, основанные на сканерах Velodyne.
Коррекция данных воздушной лазерной съемки, как правило, сводится к докалибровке углового положения сканера относительно INS. Поправки вычисляются по результатам обработки данных, полученных при сканировании калибровочного полигона, и применяются ко всему рабочему проекту.

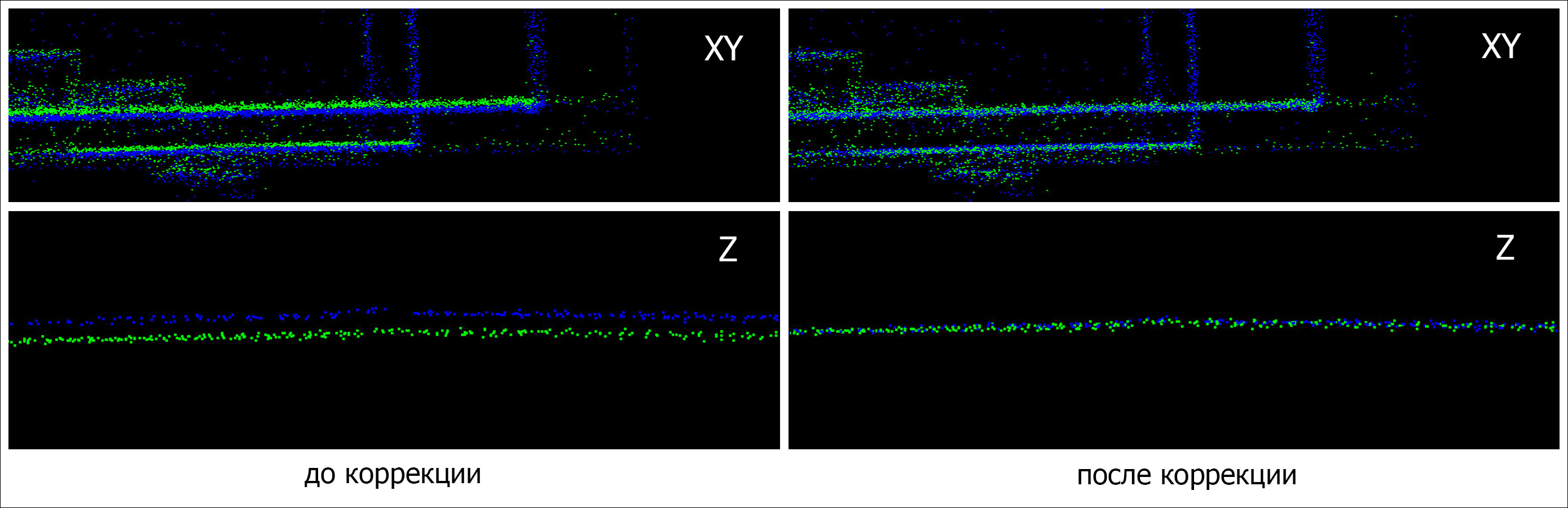
При мобильной лазерной съемке траектория, фиксируемая системой, даже после применения дифференциальных поправок, полученных от базовых станций, содержит существенные несистематические ошибки в координатах. Для компенсации этих ошибок вычисляется коррекционная кривая для траектории, определеляемая по результатам измерения «связующих линий» между маршрутами и опорных точек (при наличии). Для повышения достоверности решения при вычислении поправок используется априорная оценка точности каждого измерения траектории. На рисунках ниже показаны вектора высотной коррекции траекторий встречных маршрутов и результат автоматической «сшивки» данных мобильной лазерной съемки в плане и по высоте: